
Description:
This was a final year university project in collaboration with seven other university students (five Robotics, two Computer Science).
The goal of this project was to develop a robot (or multiple robots) that could move chairs around conference halls based on layouts that were pre-programmed in a mobile app.
The workflow of each robot was to navigate to a chair position, scan a QR code stuck to the bottom of the chair, pick up this chair, move to the nearest suitable chair position, place the chair down, and look for the next chair to move or return to its hub if nothing needs moving.
Design:
App:
Built with the React Native framework Expo.
Server:
Python Code running on a Raspberry Pi 4 Model B.
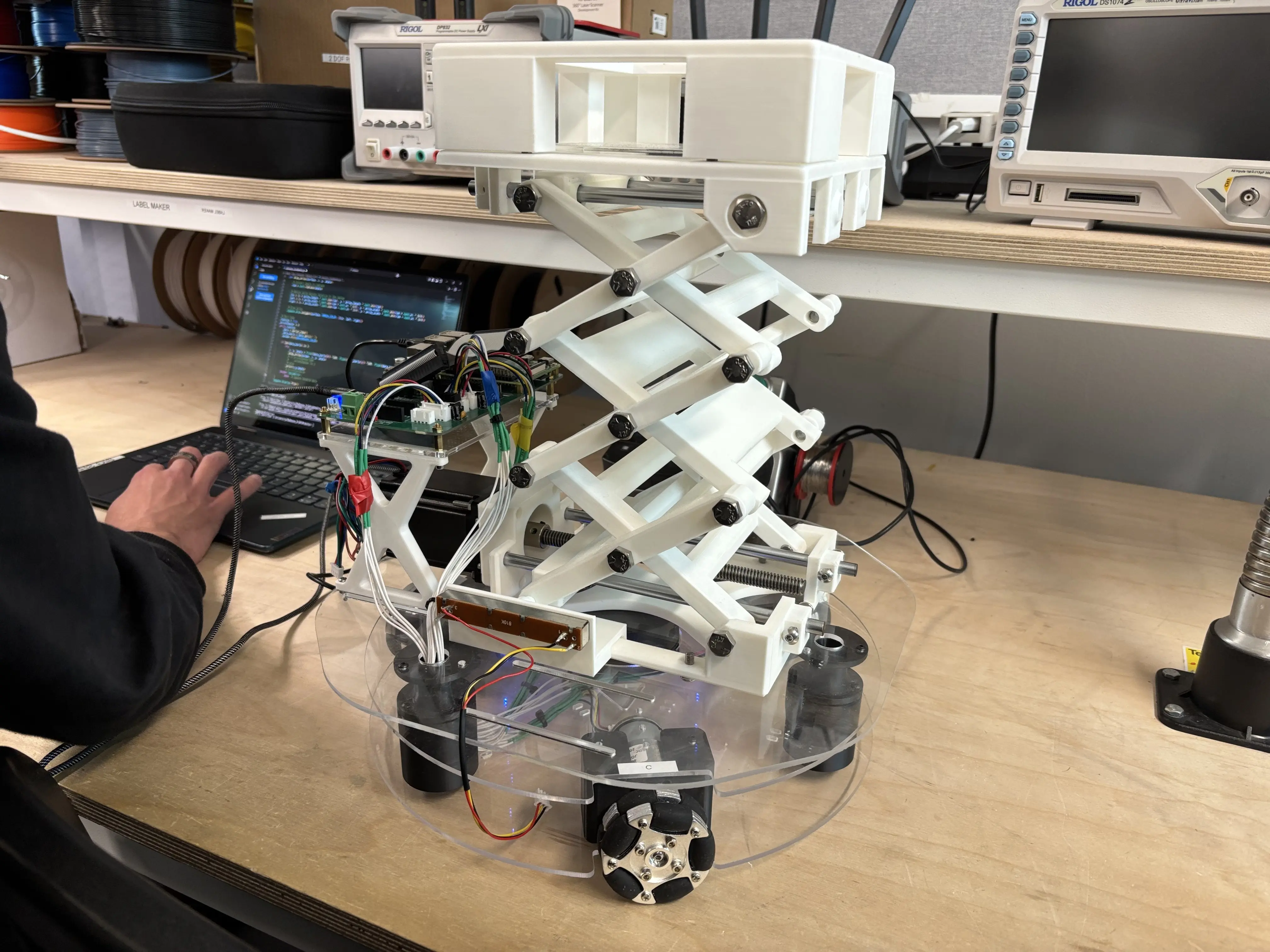
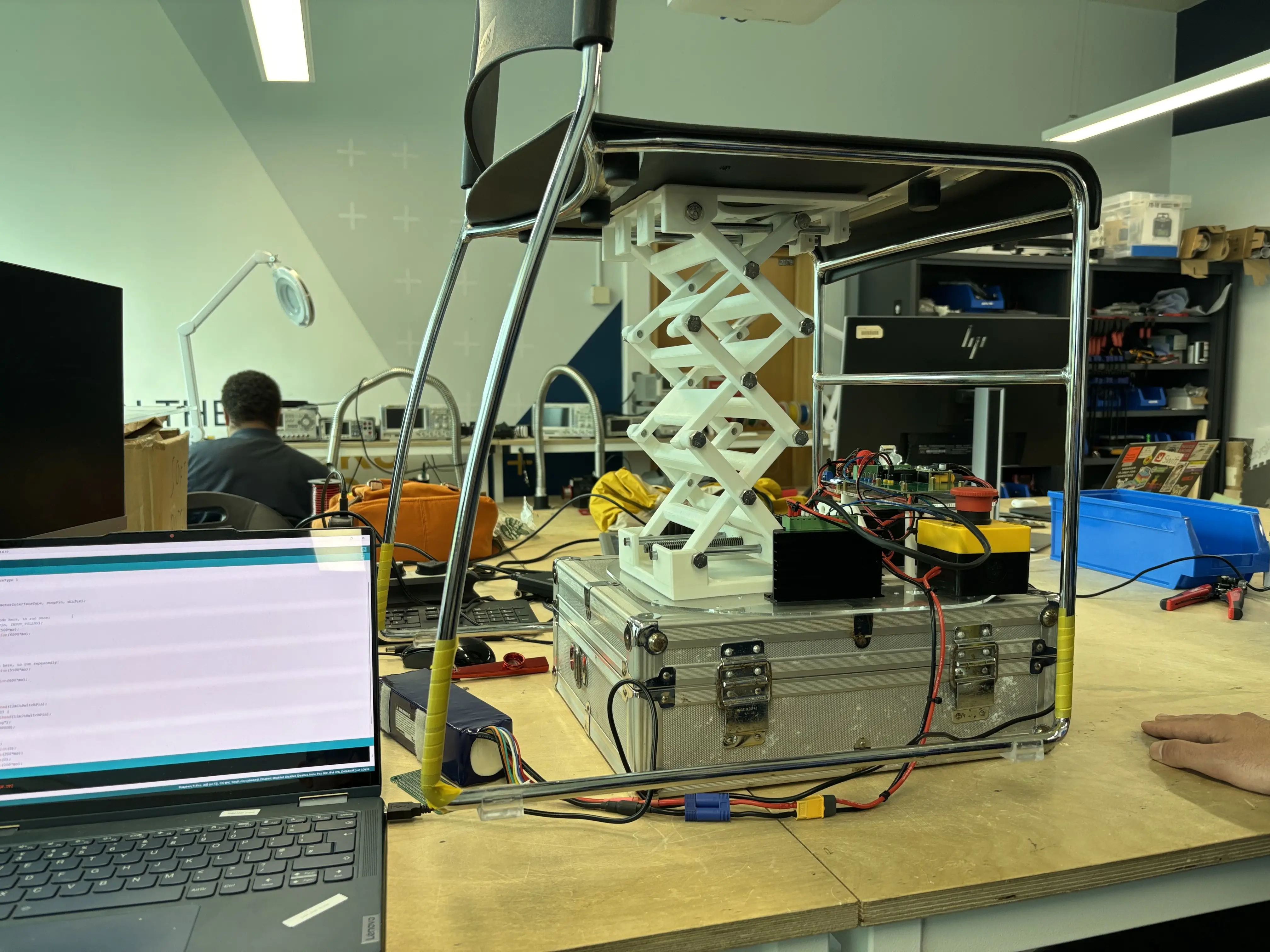
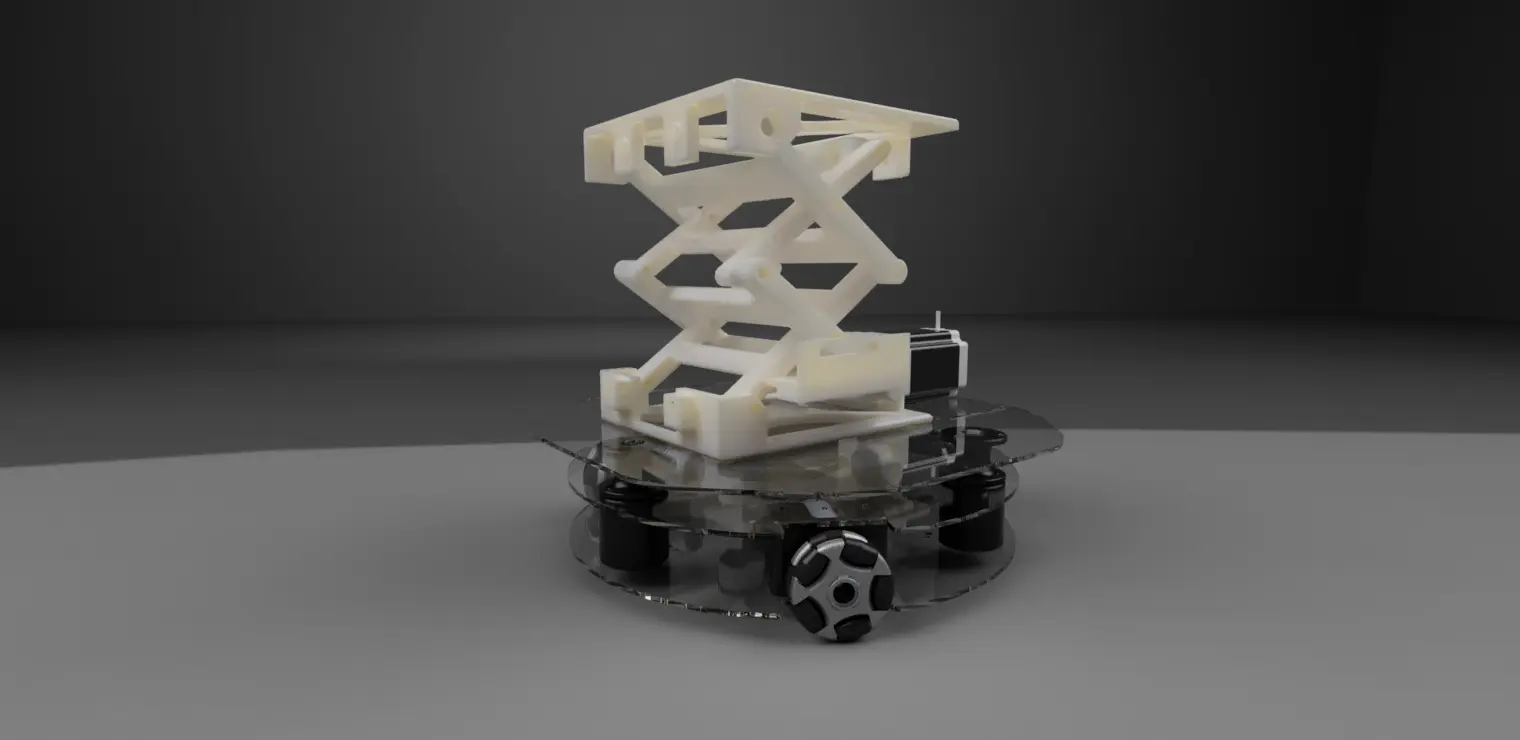
Robot:
- The base of the robot had three wheels that were omni-directional to allow for movement in any direction.
- The base also contained the custom PCB for power management and speed controllers, a 24v LiPo Battery, a Raspberry Pi 5 for ROS/Lidar processing and an Arduino for controlling movement and lifting motors.
- The middle of the robot contained the Lidar unit, with only 3 small pillars as obstructions (used to contain wiring and provide structural support)
- The upper section had a scissor lift mechanism for lifting with a camera was placed in the middle looking up for QR code scanning.
Other Hardware:
We used a dedicated Router that relayed university wifi to enable port forwarding and websocket connections while allowing active development to continue with internet connection.
Repo: